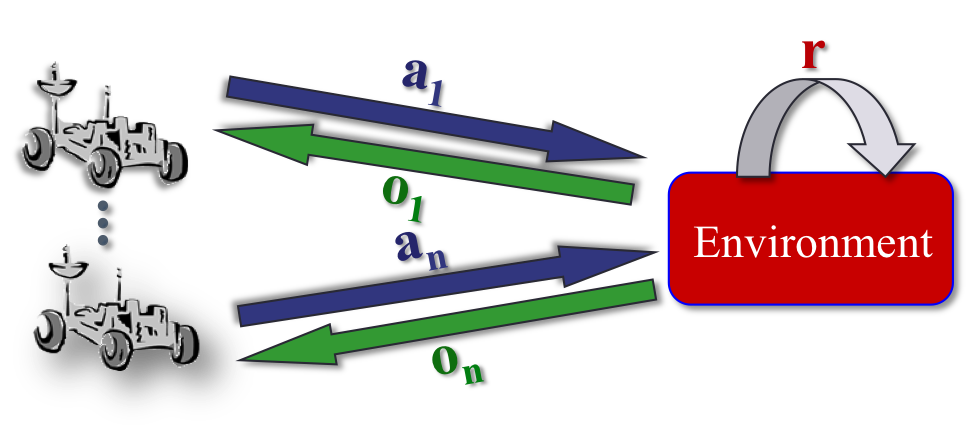
The decentralized partially observable Markov decision process (Dec-POMDP)
is a very general model for coordination among multiple agents. It is a
probabilistic model that can consider uncertainty in outcomes, sensors and
communication (i.e., costly, delayed, noisy or nonexistent communication).
This web site was created to provide information about the model and
algorithms used to solve Dec-POMDPs.