As agents are built for ever more complex environments, methods that
consider the uncertainty in the system have strong advantages. This
uncertainty is common in domains such as autonomous navigation, inventory
management, sensor networks and e-commerce. When choices are
made in a decentralized manner by a set of decision makers, the problem can
be modeled as a decentralized partially observable Markov decision process
(Dec-POMDP). While the Dec-POMDP model offers a rich framework for
cooperative sequential decision making under uncertainty, the computational
complexity of the model presents an important research challenge.
It is an extension of the partially
observable Markov decision process (POMDP) framework and a specific
case of a partially observable stochastic game (POSG) (see Hansen, et al.,
2004).
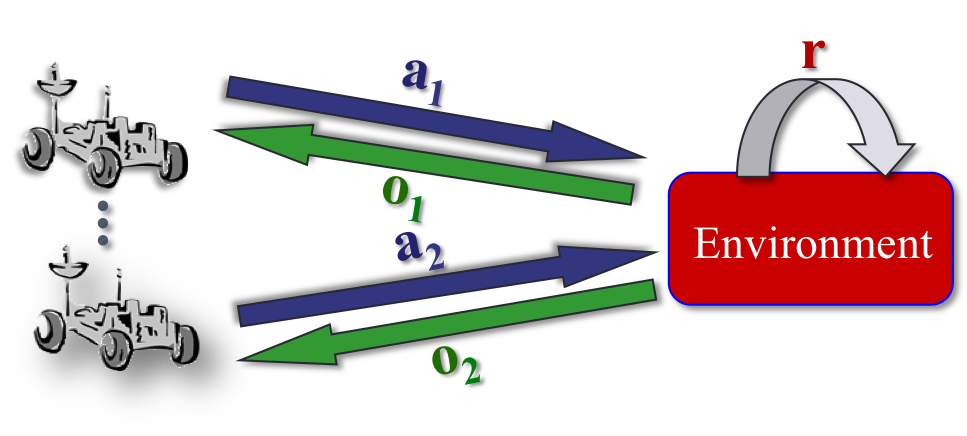
Dec-POMDPs represent a sequential problem. At each stage, each agent takes
an action and receives:
A local observation
A joint immediate reward
A local policy for each agent is a mapping from its observation sequences to
actions, Ω* → A (The state is
unknown, so it may be beneficial to remember history)
A joint policy is a local policy for each agent
The goal is to maximize expected cumulative reward over a finite or infinite
number of steps
Note that decisions for each agent are made solely on local information, but
these decisions can affect the global reward and each agent's transitions
and observations.
A Dec-POMDP can be described as follows:
M = <I, S, {Ai}, P, R, {Ωi}, O, h >
I, the set of agents
S, the set of states with initial state s0
Ai, the set of actions for agent i,
with A = ×iAithe set of joint actions
P, the state transition probabilities: P(s'|
s, a), the probability of the environment transitioning to state s'
given it was in state s and agents took actions a
R, the global reward function: R(s, a), the
immediate reward the system receives for being in state s and
agents taking actions a
Ωi, the set of observations for agent i, with Ω
= ×iΩi the set of joint
observations
O, the observation probabilities: O(o| s, a),
the probability of agents seeing observations o, given the state
is s and agents take actions a
h, the horizon, whether infinite or if finite, a positive integer
when h is infinite a
discount factor, 0 ≤ γ < 1 , is used
A Dec-MDP is defined in the same way except:
the state must be jointly fully observable. That is, the state is
uniquely defined by the observations of all agents. So, if O(o|
s, a) > 0 then P(s'| o)=1.
"... there is currently no good way to combine game theoretic and POMDP
control strategies." -- Russell and Norvig, 2003
Dec-POMDP algorithms
Optimal and approximate algorithms have been developed for general
Dec-POMDPs as well as a number of subclasses. The worst case complexity of
the general case has been shown to be NEXP-complete (Bernstein et al., 2002)
with optimal solutions found by dynamic programming (Hansen et al., 2004)
and latter by methods that can exploit structure when present. A reduction
in complexity to NP is seen when the agents are mostly independent (Becker
et al., 2003) and communication can be explicitly modeled and analyzed
(Goldman et al., 2004).
For an overview of Dec-POMDPs, subclasses and algorithms, see our latest
tutorial [pdf][webpage].